
Drivetrain packaging centered on low CG, serviceable electronics, and clear top-side volume for scoring mechanisms.
SYSTEM
High-Speed Swerve Architecture
SDS MK4i L2 | 15 ft/s free speed | 1/8 in bellypan | low-mounted controls
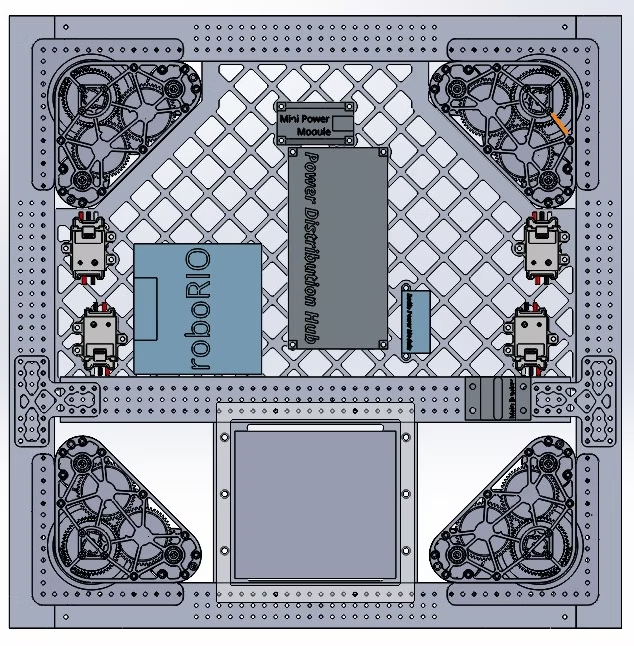
The drivebase used four SDS MK4i modules with L2 reduction for full-holonomic mobility at 15 ft/s. The 27 in by 32 in chassis used an aggressively pocketed 1/8 in bellypan, with the battery laid flat for lower center of gravity and more space above for the shooter, stinger, and controls. The RoboRIO, PDP, and swerve controllers were packaged low on the bellypan for clean integration and service access.