Manipulator-first swerve robot built for cone and cube handling, multi-level scoring, and compact arm packaging within a 30 in x 30 in frame.
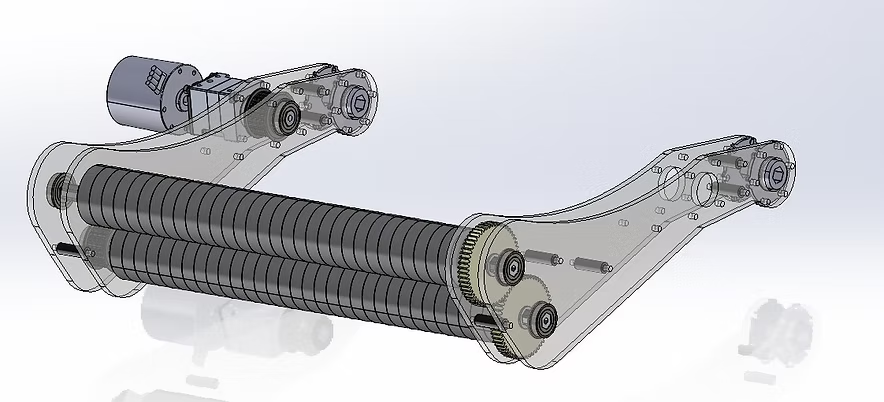
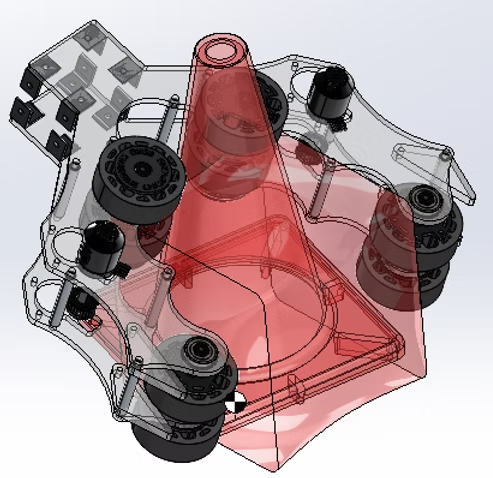
A 125 lb competition robot built around full-field mobility, rack-and-pinion arm motion, and controlled game-piece transfer. The architecture combined swerve drive, a rotating ground intake, a roller grabber, piston-assisted extension, and a landing-gear-style lead screw climb.
MISSION
Create a drivetrain and arm system capable of scoring across multiple node heights while handling both cones and cubes with repeatable mechanism behavior and manageable service demands.
ROLE
Mechanical contributor focused on drivebase architecture and end-effector packaging for a manipulator-heavy robot.
SYSTEM
Swerve chassis, rack-and-pinion pivot arm, piston-assisted extension, rotating ground intake, roller grabber, and landing-gear-style lead screw climb.
CONSTRAINTS
Broad scoring envelope, two different game-piece geometries, repeated impacts on the intake and arm, tight chassis packaging, and the need to stay serviceable throughout competition.