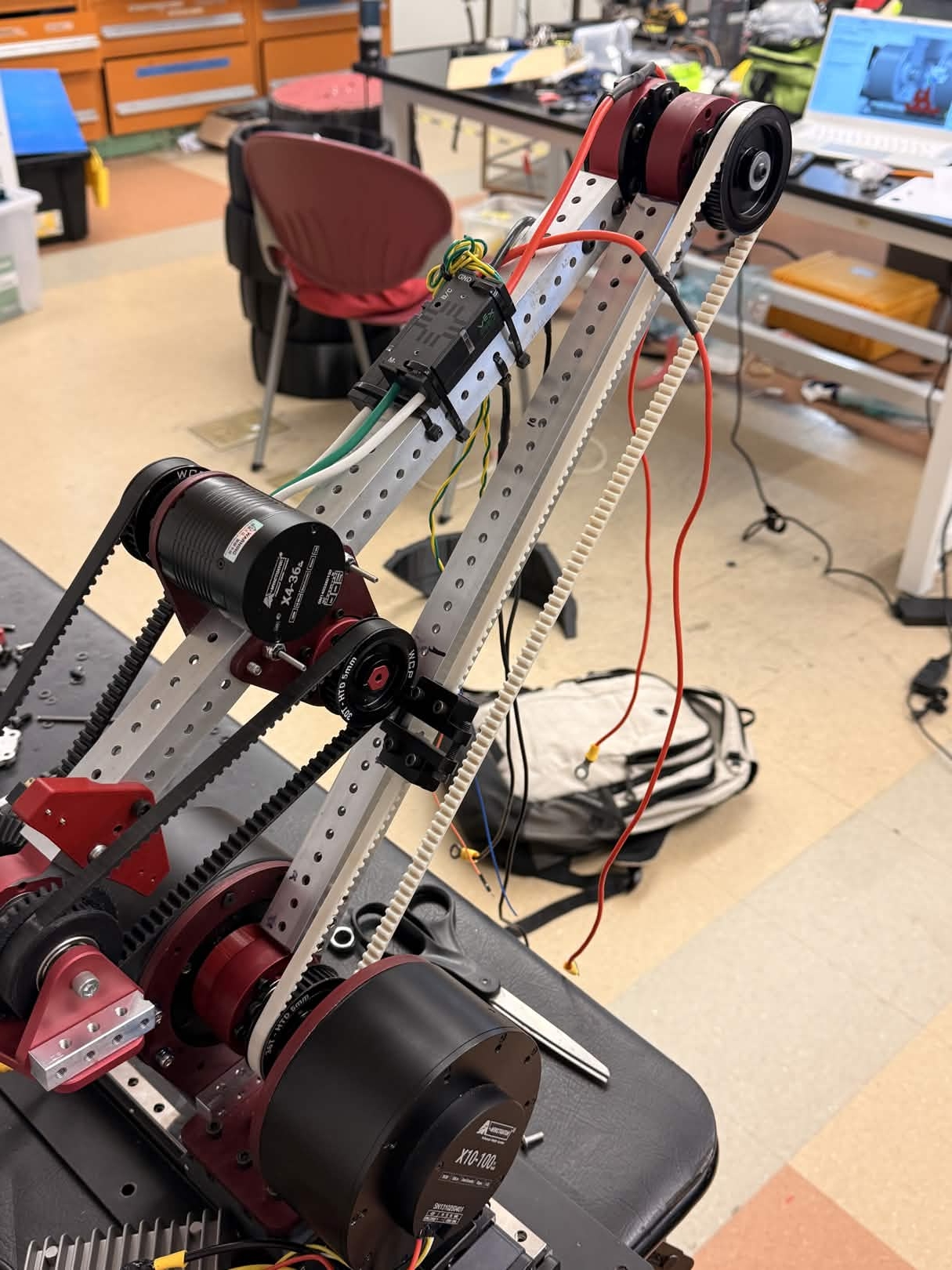
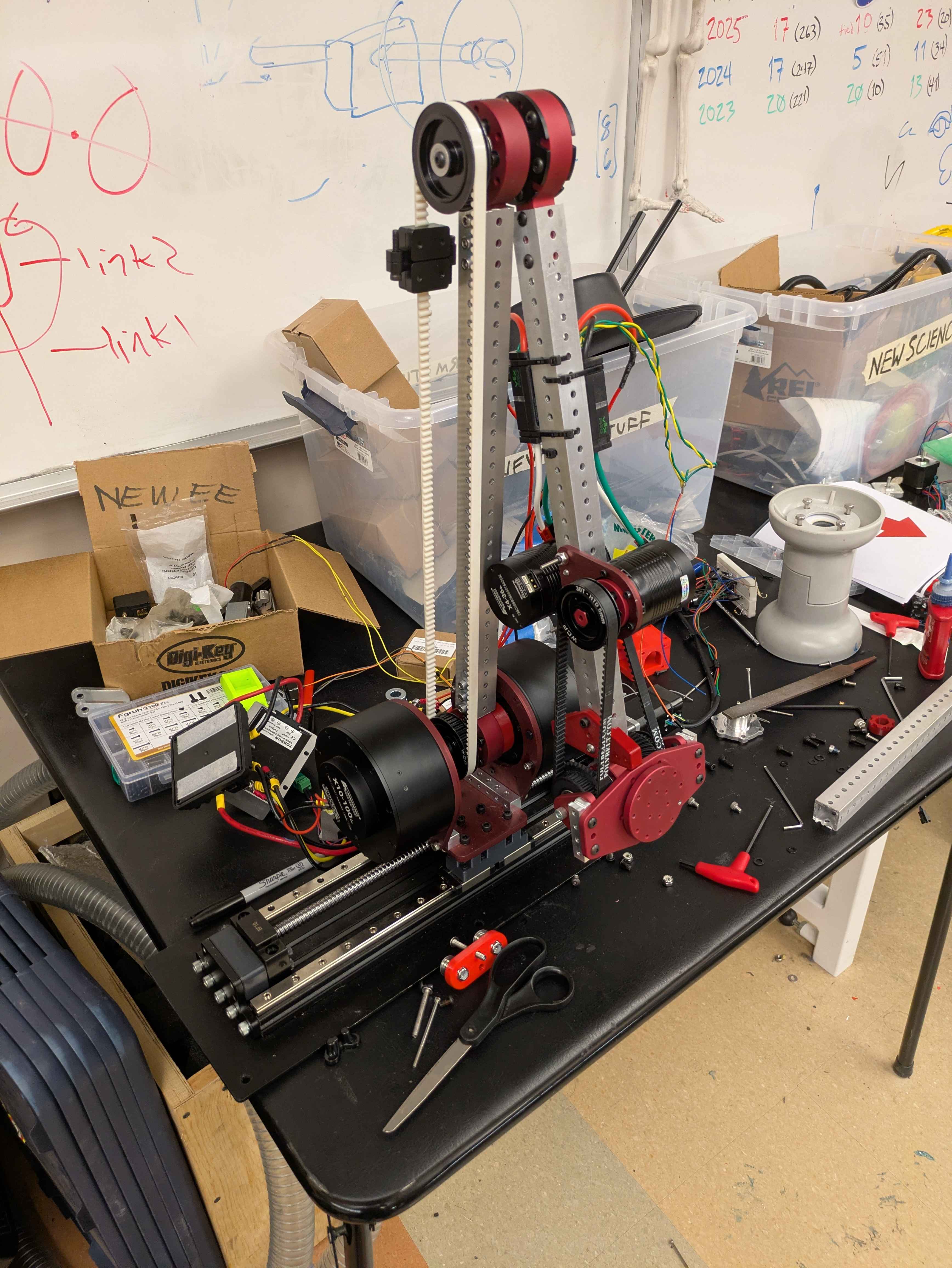
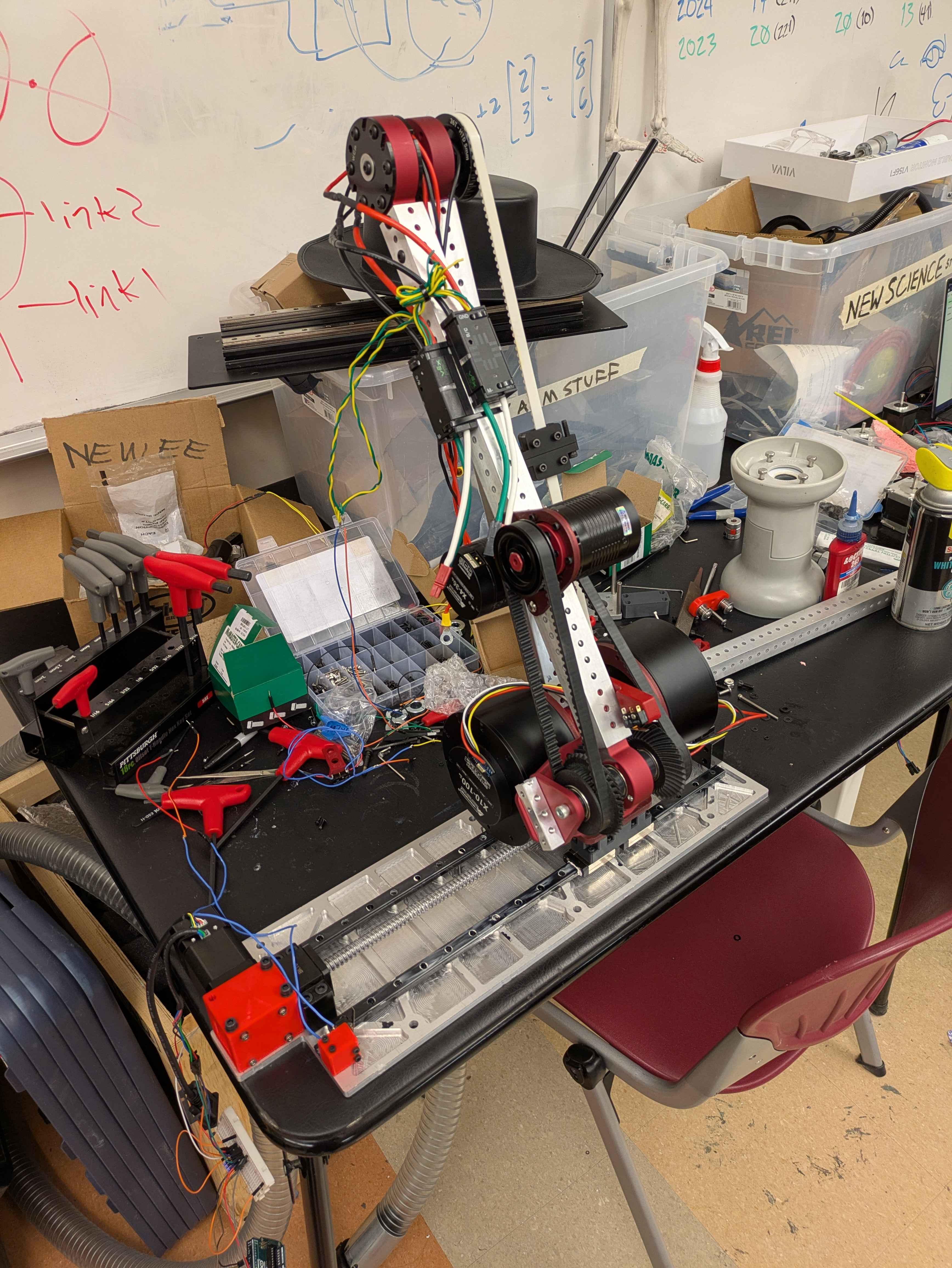
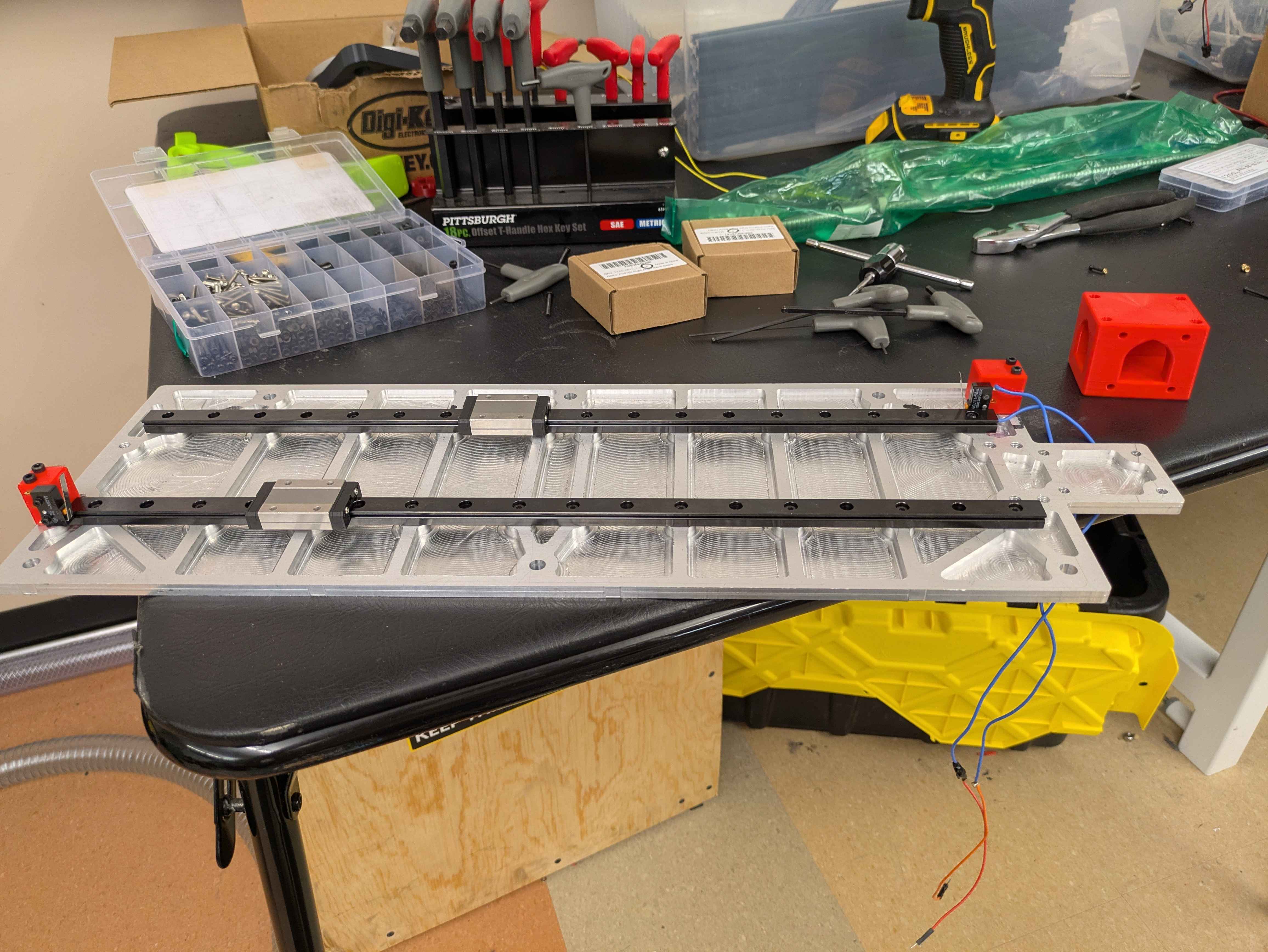
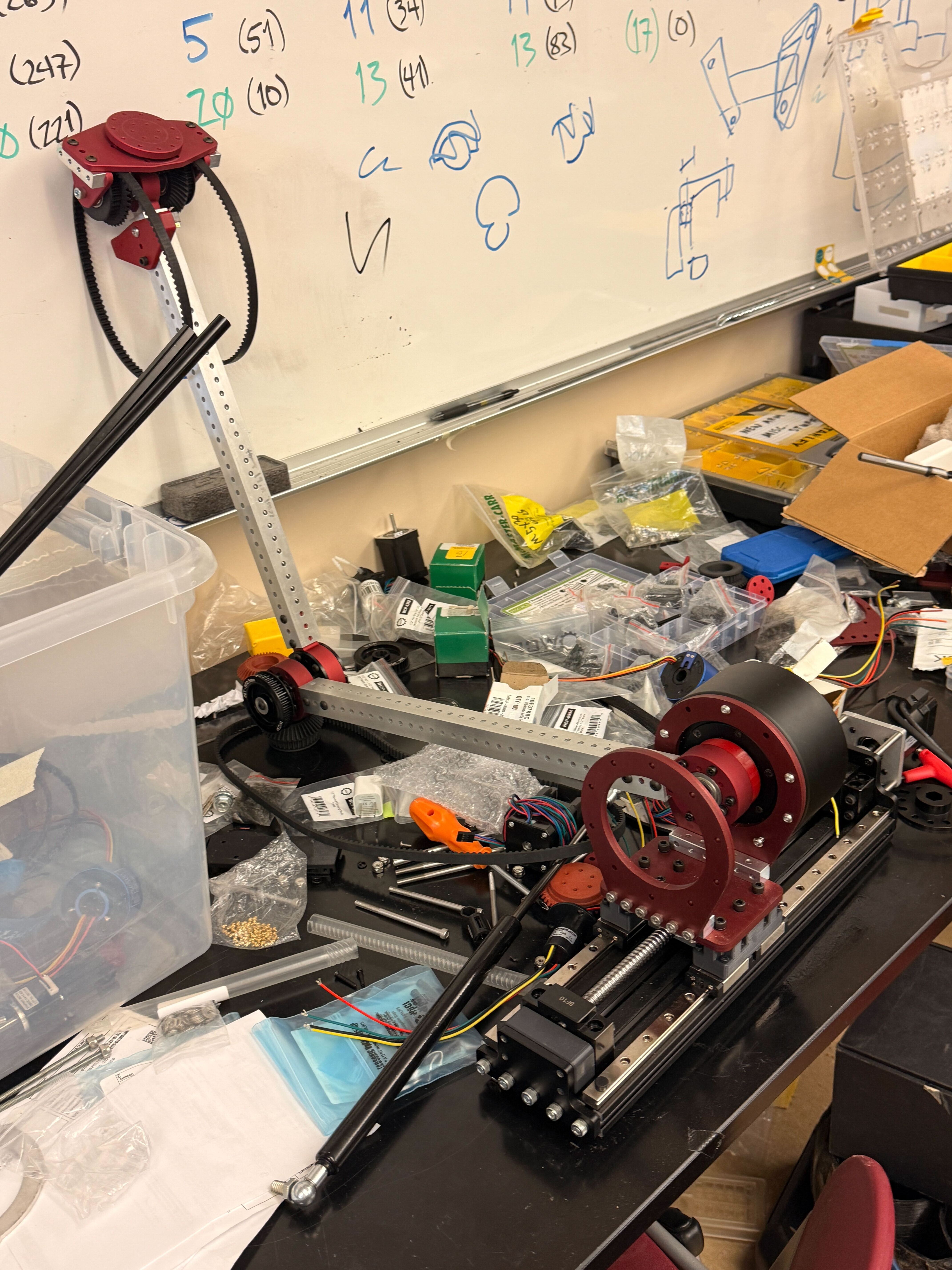
Earlier arm direction before the redesign, representing the heavier and more universal approach we moved away from.
DESIGN PROBLEM
Replacing an Overbuilt 6-DOF Arm
Previous direction | heavier drive stack | longer reach
The 2025 competition arm had more theoretical freedom, but it came with a heavy drive stack, longer reach, and more complexity than the task set realistically demanded. It weighed about 17 kg and used large COTS harmonic drives along with custom cycloidal gearboxes.
For 2026, the goal was not to build the most universal arm possible. The goal was to build a manipulator that could satisfy the University Rover Challenge requirements while giving the rover more weight margin, cleaner integration, and a newer system to present at competition.